
Meccatronica
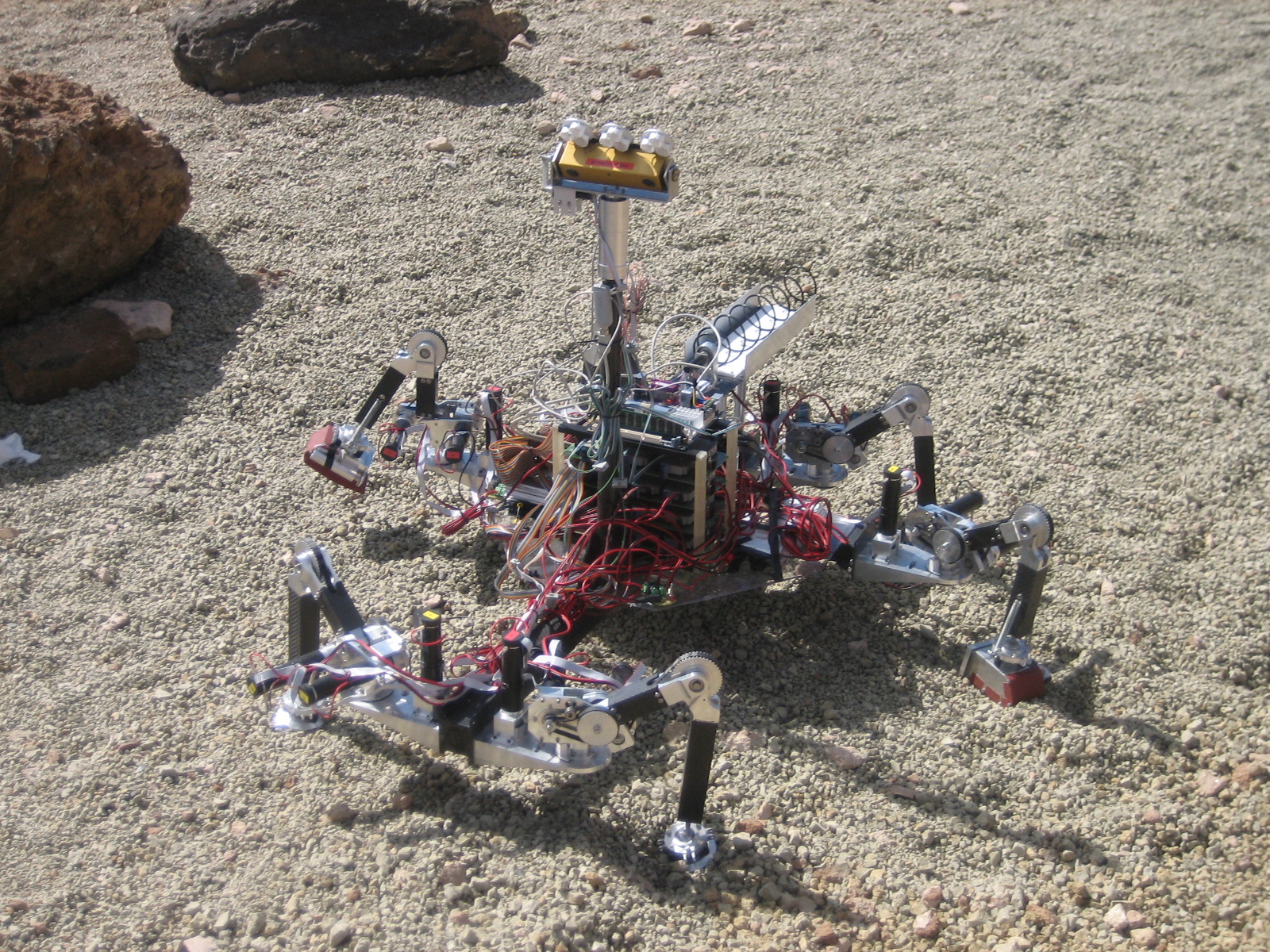
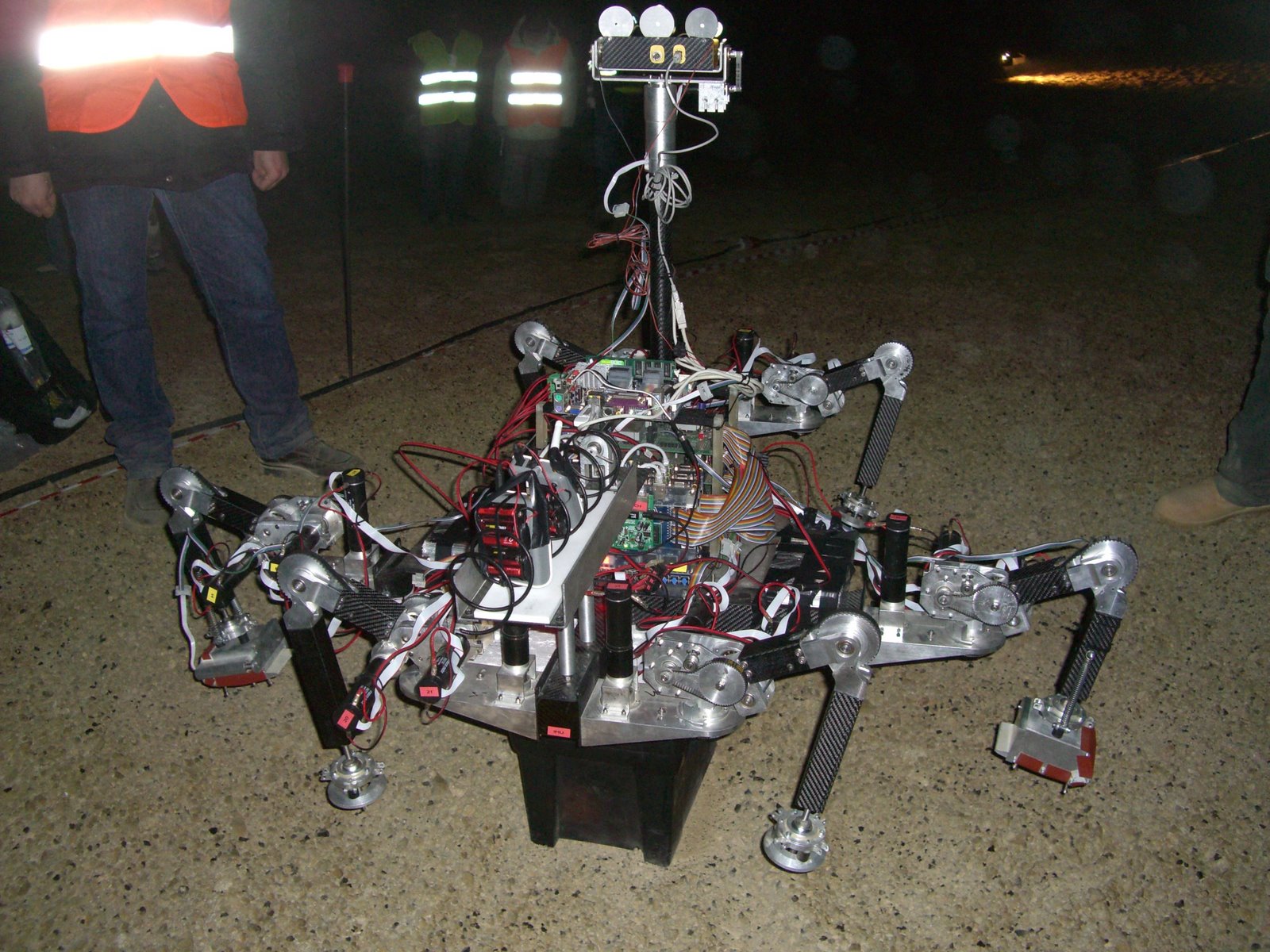
Micromecc ha contribuito alla creazione del robot a sei zampe che ha partecipato all'ESA Lunar Robotics Challenge.L'obiettivo del robot era prelevare campioni di suolo dall'interno di un cratere profondo 15m, scalandone due volte le pareti durante il percorso di andata e ritorno dal punto di atterraggio.